2018 yılında TEKNOFEST kapsamında İstanbul 3. Havalimanı'nda üçüncüsü düzenlenen TÜBİTAK Uluslararası İnsansız Hava Araçları (UAV2018) yarışmasına ait görüntülerin yer aldığı sayfamıza hoş geldiniz.
Takım olarak "İstikbal göklerdedir..." (Mustafa Kemal ATATÜRK) ideali yolunda ilerlemekteyiz.
MARUN-ÇELEBİ ekibi...
10 kişilik MARUN-ÇELEBİ ekibi şu kişilerden oluşmaktadır: - Ahmet YEŞİLYURT (Takım Kaptanı) - Yunus Emre ÖZDEMİR (İHA Pilotu) - Erhan ERDEM - Ferit TİRYAKİ - Kübra PEHLİVAN - Muharrem Ali BAYRAK - Murat Cenk YILMAZ - Serhat TUĞAN - Yücel GÜNGÖR - Barış DOĞAN (Akademik Danışman)
UAV2018 yarışması hakkında: UAV2018 yarışması 3 farklı görevden oluşmaktadır. 1. görev elle görerek uçuş prensibine dayalı ve uçuş süresi ile hava aracının ağırlığına göre puanlamanın yapıldığı yarıştır. 2. görev ise uçuş alanında önceden belirlenmiş olan 2 x 2m ölçüde 4 farklı bölgeye 80gr ağırlığındaki 4 farklı topun otonom olarak bırakılmasına yöneliktir. Puanlama yüklerin hedeflere başarılı bir şekilde bırakılan yük sayısına göre yapılmaktadır. 3. görev ise topun otonom olarak bir uçuş alanındaki bir noktadan alınarak başka bir noktaya bırakılmasına yöneliktir. 3. görevde puanlama ise yükün alınabilmesi ve hedefe bırakılmasına göre yapılmaktadır. Toplam 3 görevden oluşan yarışmada MARUN-ÇELEBİ 1. ve 2. görevleri eksiksiz olarak tamamlamıştır. Yarışmanın en zor görevi olan 3. görevi yapmaya, döner kanat kategorisinde ciddiyetle girişen tek takım olan MARUN-ÇELEBİ, otonom uçuşla yükü almayı başarmış, orta noktayı geçerek yarım görev etabı puanını hak etmiş, fakat bırakma noktasına metreler kala aşırı yükten dolayı oluşan pervane kırımı nedeniyle görevi tamamlayamamıştır. Bu nedenle de 3. görevden puan alamamıştır. 2017 yılında düzenlenen UAV2017 yarışında, hava aracında 2 adet GPS kullanan ilk ve tek takım olan MARUN-ÇELEBİ; bu sene de yarışmada kullandığı "anten takip sistemiyle" ilklerin takımı olmaya devam etmiştir. 3. görevi tamamlayamadığı için genel klasmanda 6. sırada olan MARUN-ÇELEBİ, özellikle 3. görevi gerçekleştirmede gösterdiği çaba, ürettiği yaratıcı çözüm ve 3. görevde yükü başarıyla alabilmiş tek takım olması sebebiyle mansiyon ödülüne layık görülmüştür.
|________@________|
Görseller:
Resim #1: TÜBİTAK UAV2018 yarışması takım fotoğraf çekilme alanı.

Resim #2: İşte MARUN-ÇELEBİ takımı...

Resim #3: Maddi ve manevi desteklerinden ötürü Marmara Üniversitesi Teknoloji Fakültesi yönetimine teşekkür için iadeyi ziyaret yaptık.

Resim #4: T.C. Sanayi ve Teknoloji Bakanı Sayın Mustafa VARANK ile Bakan Yardımcısı Sayın Mehmet Fatih KAÇIR yarışma çadırındaki masamızı ziyaret etti.

Resim #5: TÜBİTAK Başkanı Sayın Prof. Dr. Hasan MANDAL MARUN-ÇELEBİ takımıyla birlikte...

Resim #6: TEKNOFEST alanındaki podyuma çıktık, Cumhurbaşkanı Yardımcısı ve diğer devlet büyüklerinin elinden ödülümüzü aldık.

Resim #7: TEKNOFEST alanında turbo prop nakliye uçağı yanında MARUN-ÇELEBİ.

Resim #8: TÜBİTAK UAV2018 yarışma alanında MARUN-ÇELEBİ.

Resim #9: TÜBİTAK UAV2018 yarışma çadırında MARUN-ÇELEBİ.

Resim #10: TÜBİTAK UAV2018 yarışma çadırında çalışırken MARUN-ÇELEBİ.

Resim #11: TÜBİTAK UAV2018 yarışma çadırında çalışırken MARUN-ÇELEBİ, neye güldük hatırlamıyoruz, fakat yarış sırasında çok da güldük :))).

Resim #12: TÜBİTAK UAV2018 yarışma çadırında MARUN-ÇELEBİ.

Resim #13: Uçuş öncesi çadırdan çıkmadan önce gurur pozu.

Resim #14: Eski ve yeni öğrencilerimiz çadıra ziyaretimize gelmiş.

Resim #15: Yarışma çadırında, çalışmaya ara vermişiz.
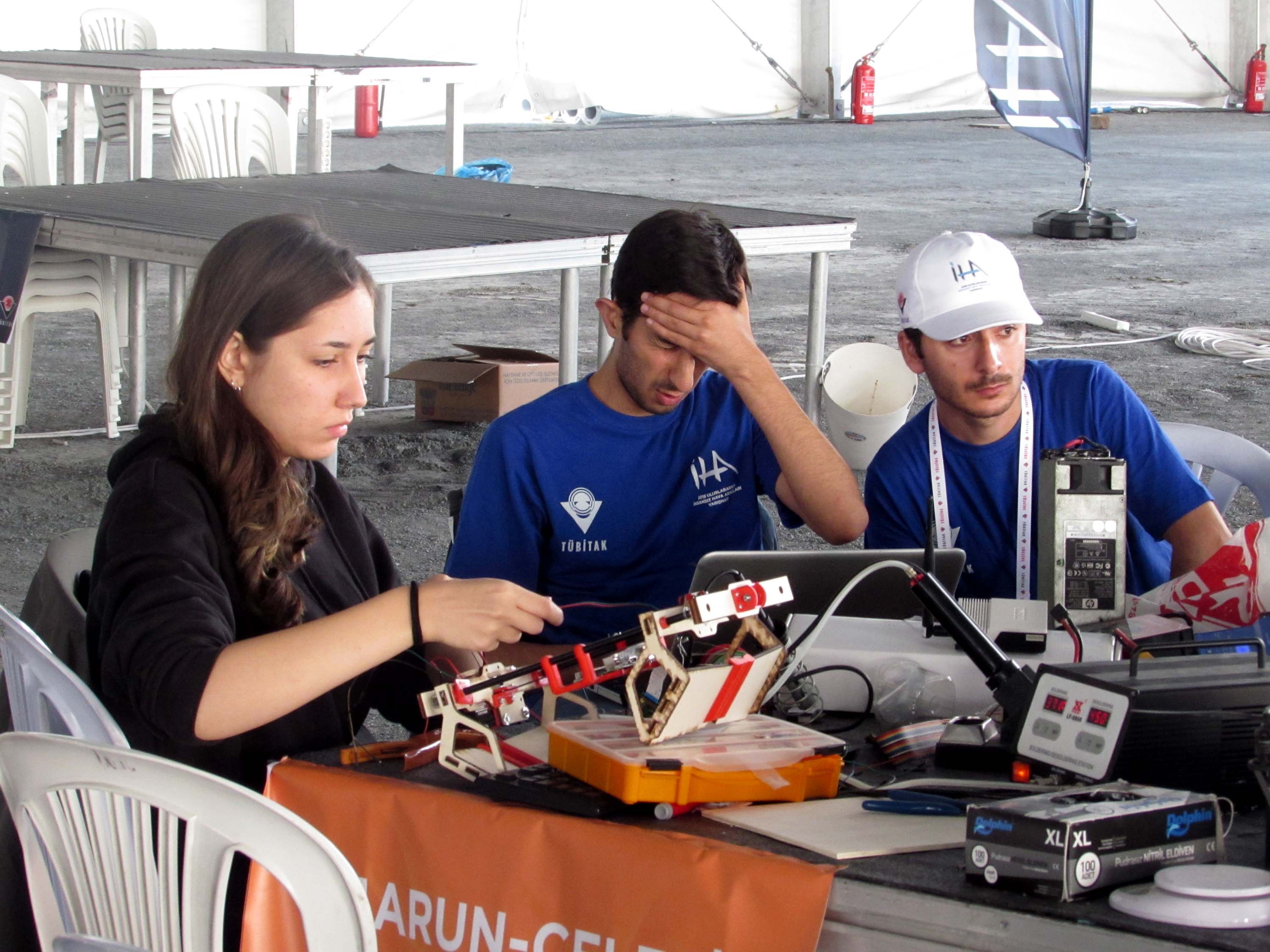
Resim #16: Kübra yük alma sistemini hazırlarken ve Murat Pyton kodunda nerede hata yaptım diye dövünürken, Serhat nereye bakıyor???

Resim #17: Mission Planner yazılımında otonom görev tanımlama ile ilgili Emre'ye açıklama yaparken...
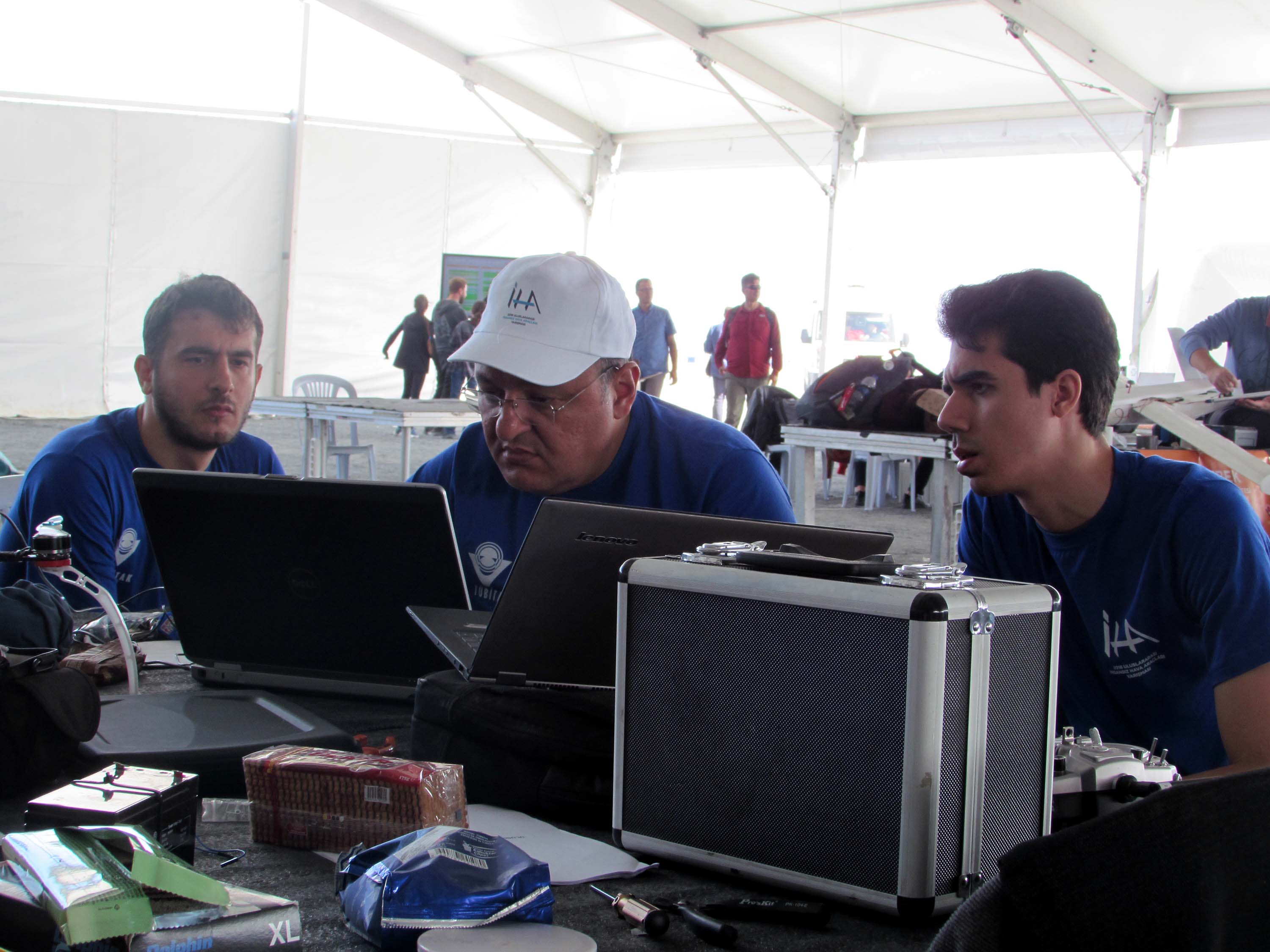
Resim #18: Emre ve Ferit ile birlikte Mission Planner yazılımında otonom görev tanımlama yaparken...

Resim #19: Ahmet ile birlikte Mission Planner yazılımında otonom görev tanımlama yaparken, arka tarafta Muharrem ile Yücel anten takip sistemiyle uğraşırken...

Resim #20: Takım dayanışması budur, Ahmet Emre'ye masaj yaparken :)))

Resim #21: Ne yapıyorduk emin değilim, her halde otonom görev tanımlaması yaparken...

Resim #22: Muhteşem ikili 1: Muharrem ile Murat...

Resim #23: Muhteşem ikili 2: Ahmet ile Serhat...

Resim #24: Kübra 3. görevde kullandığımız yük alma sisteminin lehimlerini yaparken, biraz uzaklara dalmış :)))

Resim #25: Murat 3. görevde kullandığımız yük alma sistemine sonradan eklediğimiz ve yerdeki tülü tutmada kullandığımız olta iğnelerini düzenlerken...

Resim #26: 2. görev uçuşu öncesi ekibimiz... (Soldan Emre, Muharrem, Ahmet, Yücel ve ben)
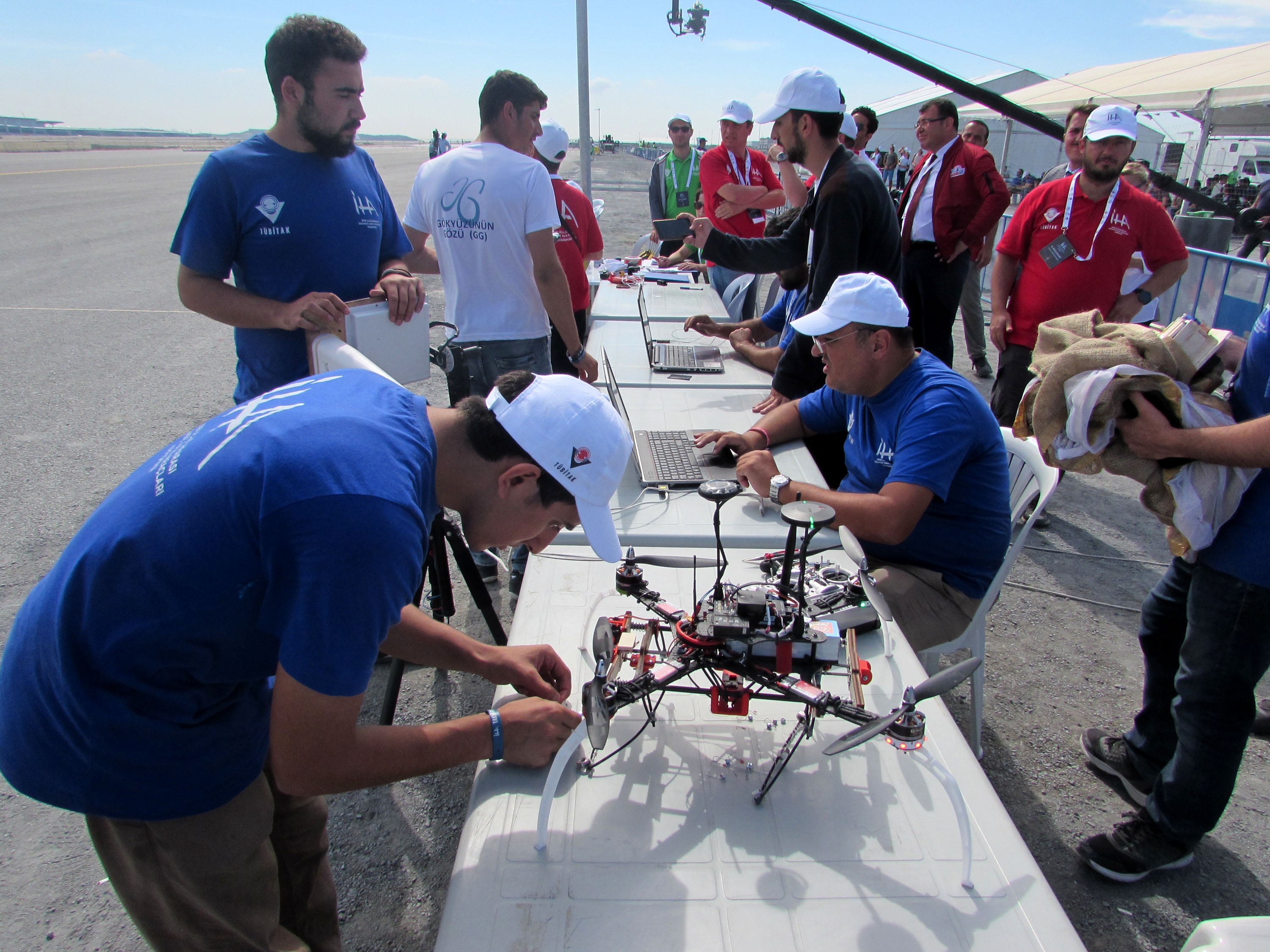
Resim #27: 3. görev uçuşu öncesi hazırlık masasındaki ekibimiz, yer istasyonu, yük ve iğneli yük alma sistemini hazırlarken...

Resim #28: 1. görev öncesi pilotumuz Emre hakemden direktif alırken...

Resim #29: "Dron gören köylü" misali bakarken, Ahmet :)))

Resim #30: "Dron gören köylü" misali bakarken, Serhat :)))

Resim #31: 3. görevdeki ilk başarısızlıktan sonra Erhan ve Murat...

Resim #32: 3. görevdeki ilk başarısızlıktan sonra Kübra ve Muharrem...

Resim #33: 3. görevdeki ilk başarısızlıktan sonra Yücel...

Resim #34: 3. görevi yapamayıp birinciliği kaçırdıktan sonra Muharrem...

Resim #35: 3. görevi yapamayıp birinciliği kaçırdıktan sonra (soldan) Erhan, Murat, Kübra, Serhat...

Resim #36: 3. görevdeki ilk başarısızlıktan sonra uçan Ahmet...

Resim #37: 3. görevdeki ikinci başarısızlıktan sonra Kübra...

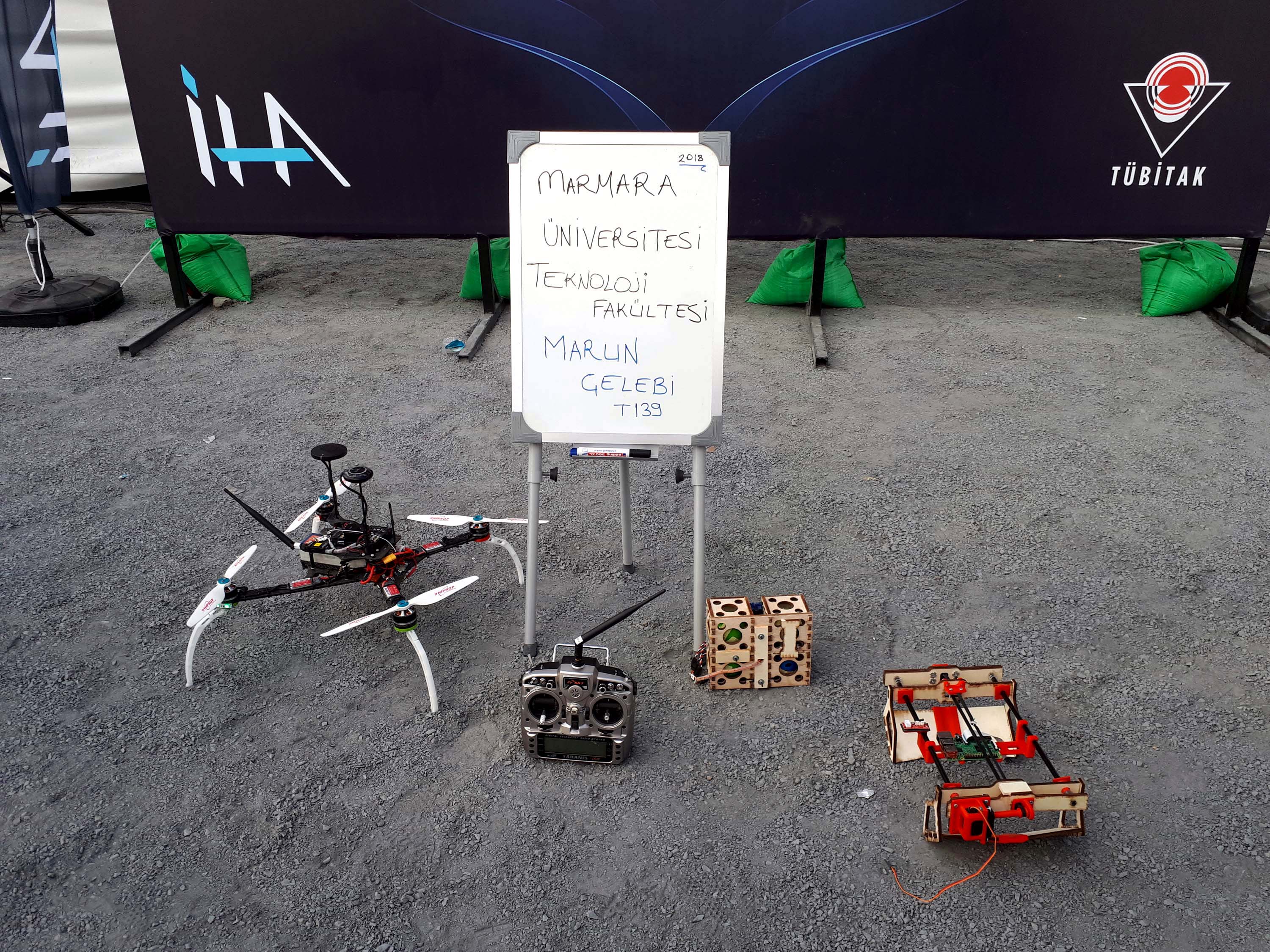
Resim #38: 1. görev için uçuşa hazır durumdaki (yüksüz) TulparV2 görüntüsü...

Resim #39: 2. görev için uçuşa hazır durumdaki (yük bırakma sistemi taşıyan) TulparV2 görüntüsü...
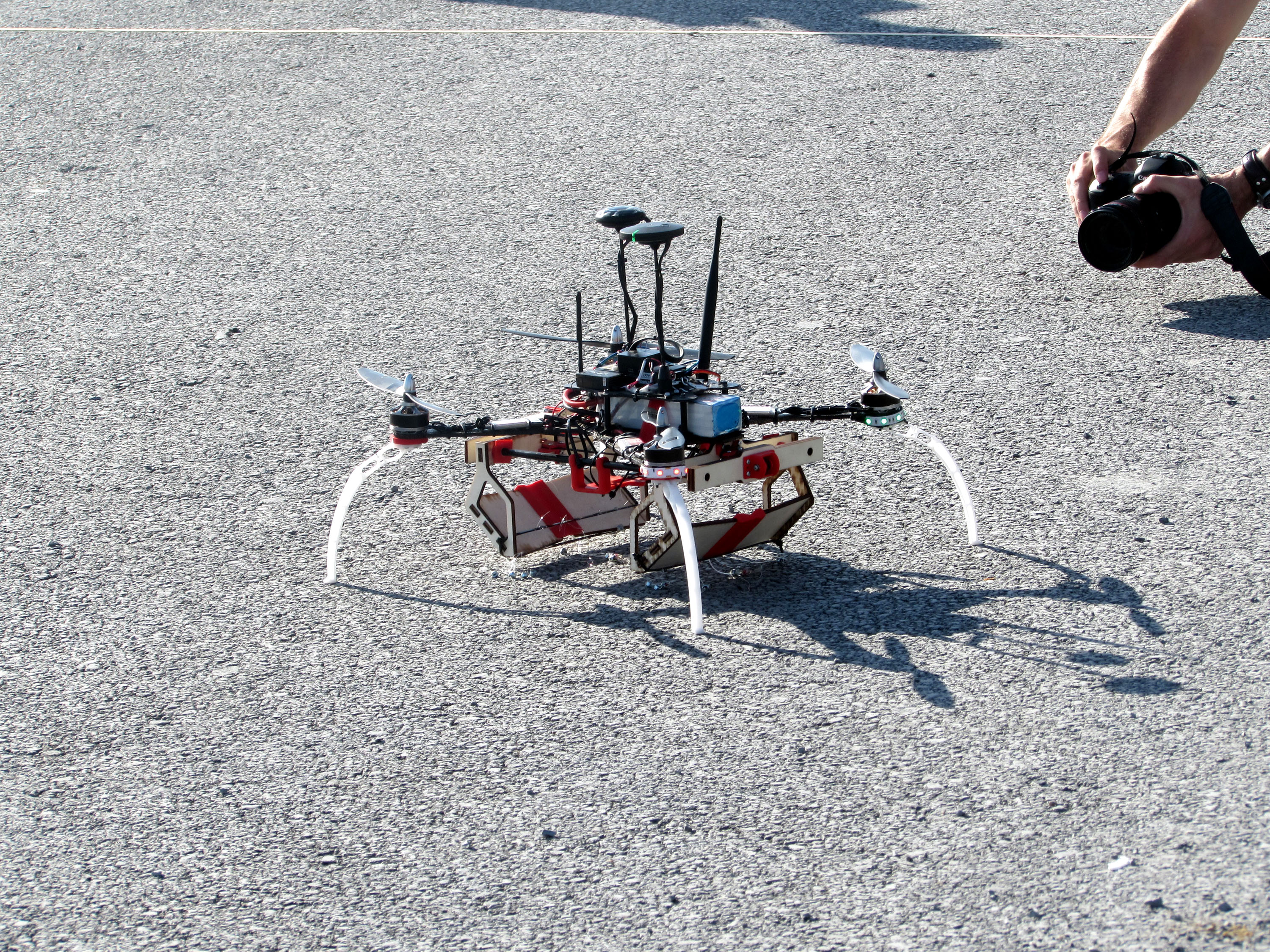
Resim #40: 3. görev için uçuşa hazır durumdaki (modifiyeli yük alma sistemini taşıyan) TulparV2 görüntüsü...
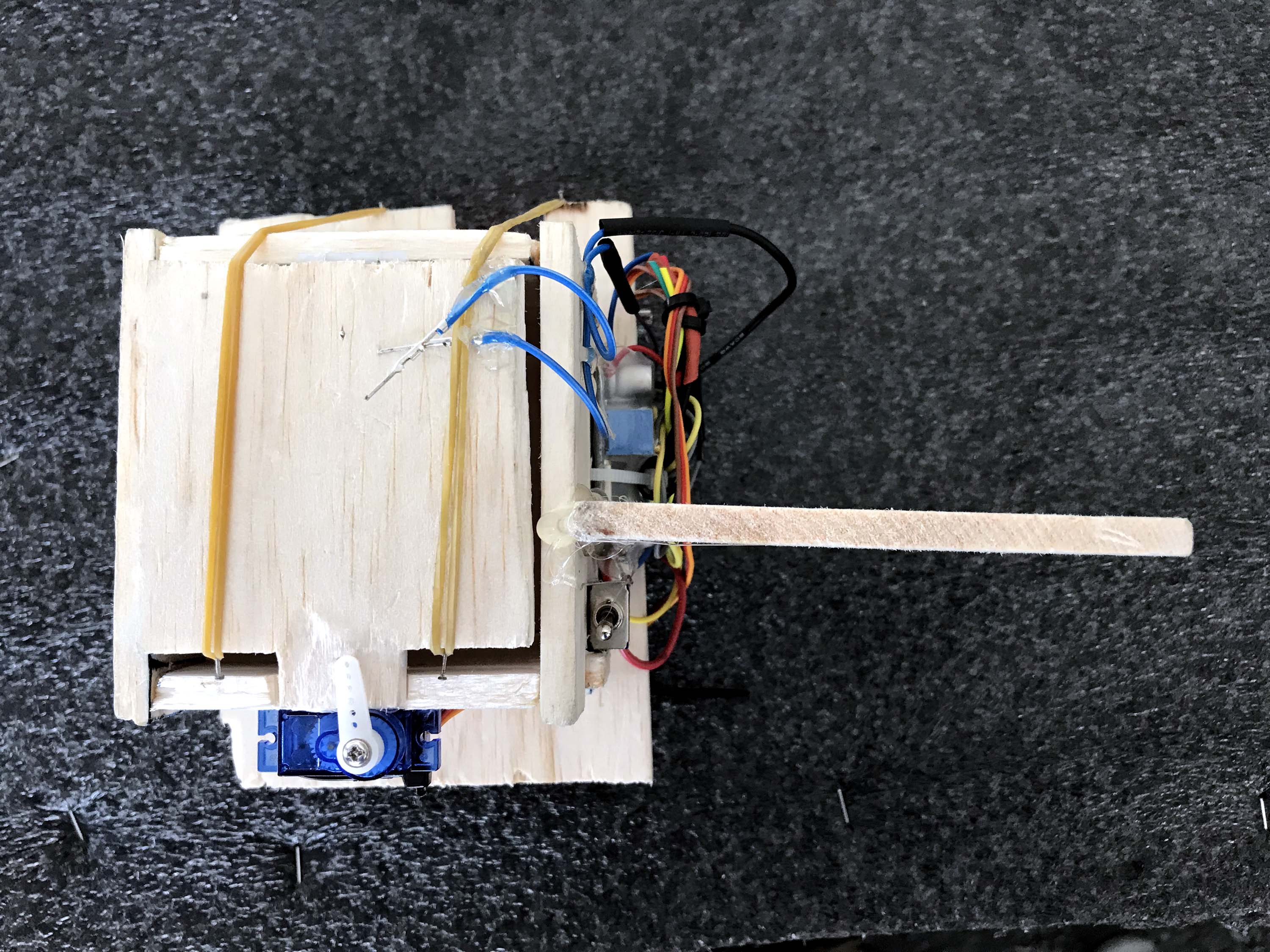
Resim #41: 3. görevdeki topu (kefal) taşıyan tam otonom yük bırakma mekanizması görüntüsü... Yerden alınacak kefal bu kutunun içinde bulunmakta ve kutu kapağının açılması servo motor ile kontrol edilmektedir. Kutu yere serilen tül ağının ucuna bağlanmıştır. Böylelikle TulparV2 tülün üzerine iniş yaptığı zaman, alt tarafa bağlanan olta iğneleri tüle takılarak, tülü ve bağlı olan kutuyu yerden kaldıracaktır. Kutunun yerden kalktığını algılamak için lazerli mesafe sensörü (VL6180X) kullanılmıştır. Mission Planner da hazırlanan görevden hesaplanan uçuş süresine göre belirli bir süre geçtikten sonra kapak açılmaktadır. Yarışma zamanı 3. Havalimanı çok rüzgarlı olduğu için GPS'e güvenerek hassas iniş yapamayacağımız düşüncesiyle önceden hazırladığımız görüntü işleme tabanlı iniş sisteminden vaz geçmek durumunda kaldık. Yere tül sererek ve tül üzerine iniş yaparak hedefi büyütmeyi amaçladık. Bu yaklaşımı yarışma şartlarını gördükten sonra Cuma gece yarısından başlayarak sabaha kadar uyumadan hazırladık. Fakat bir gün önce yaptığımız deneme uçuşunda yapısal olarak güçlü olan pervanelerden birini kırmamız, yedek pervane stoğunu da yarışma öncesi son gece tüketmemiz sebebiyle yapısal olarak zayıf plastik pervaneye geçmemiz; sabah erken saatlerde güzel havadaki ilk denememizde, hava aracında kullandığımız sigortanın motorların çektiği akıma dayanamayıp atması; ikinci ve son denememizde de hava şartlarının aleyhimize dönmesi sebebiyle yapısal olarak zayıf olan plastik pervanelerin, hedefe metreler kala aşırı yüke dayanamayarak kırılmasıyla birlikte 3. görevi tamamlayamadık. Böylece birinciliği kaçırmış olduk :(((
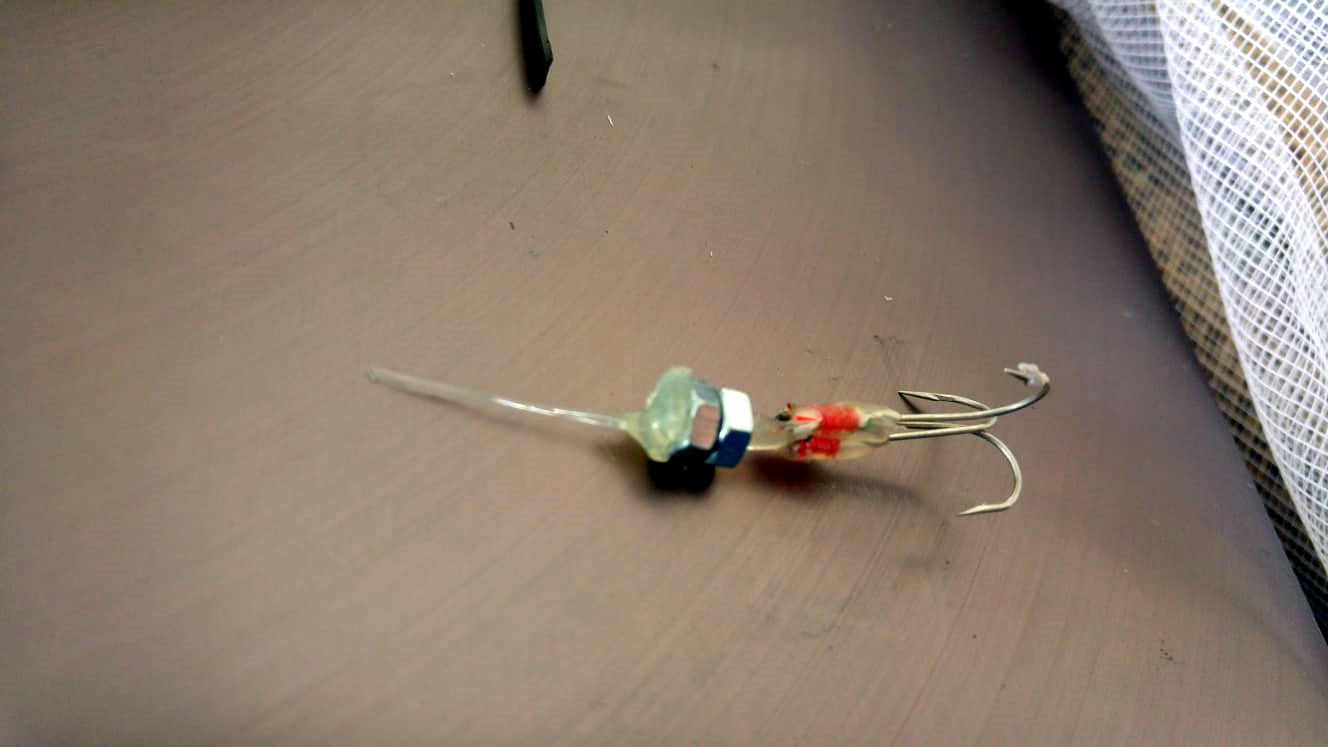
Resim #42: 3. görev için hazırladığımız çapari iğne görüntüsü... Ağırlık yapsın ve tülün üzerine bastırsın diye tüm çaparilere somunlar bağladık.

Resim #43: 3. görevdeki ilk başarısızlıktan sonra tül üzerinden çapari iğnelerini ayıklarken... Bu arada sineklik olan tül, hava aracı üzerine konarken uçuşup pervanelere dolanmasın diye, tülü bahçe çuvalından oluşturduğumuz çuha üzerine diktik. Çuhanın her köşesine uçmasın diye ağırlıklar bağladık. Bu nedenle normalde taşımamız gereken 80gr lık top 1,5 kilolara çıkmış oldu. Bu da önceden ön görmediğimiz sigorta atması, pervane kırılması gibi sorunlara neden oldu.

Resim #44: Yakışıklımız Yücel, anten takip sistemiyle birlikte...

Resim #45: Takımın abisi Ferit, kendisine gülmek çok yakışıyor...

Resim #46: Yarışa giderken ki halleri, arkayı dörtlemişiz...

Resim #47: Madalyamız...

Resim #48: Birçok eksikliğine rağmen böylesi bir etkinliği düzenleyen T3 vakfına teşekkür ederiz.

Resim #49: İstikbal göklerdedir... Ne mutlu Türküm diyene... Mustafa Kemal ATATÜRK